
Wymagania przemysłu kosmetycznego dotyczące maszyn pakujących są bardzo wysokie: “Żywotność opakowania zewnętrznego jest bardzo krótka, ale odgrywa ważną rolę w przemyśle kosmetycznym. Doskonała jakość składanego pudełka musi być natychmiast widoczna, ważne, aby nie było zadrapań”, wyjaśnia Sébastien Boileau, dyrektor ds. marketingu w Citus Kalix. Najwyższa jakość przy jednoczesnym uniknięciu zadrapań na pudełku – oto cel Citus Kalix.
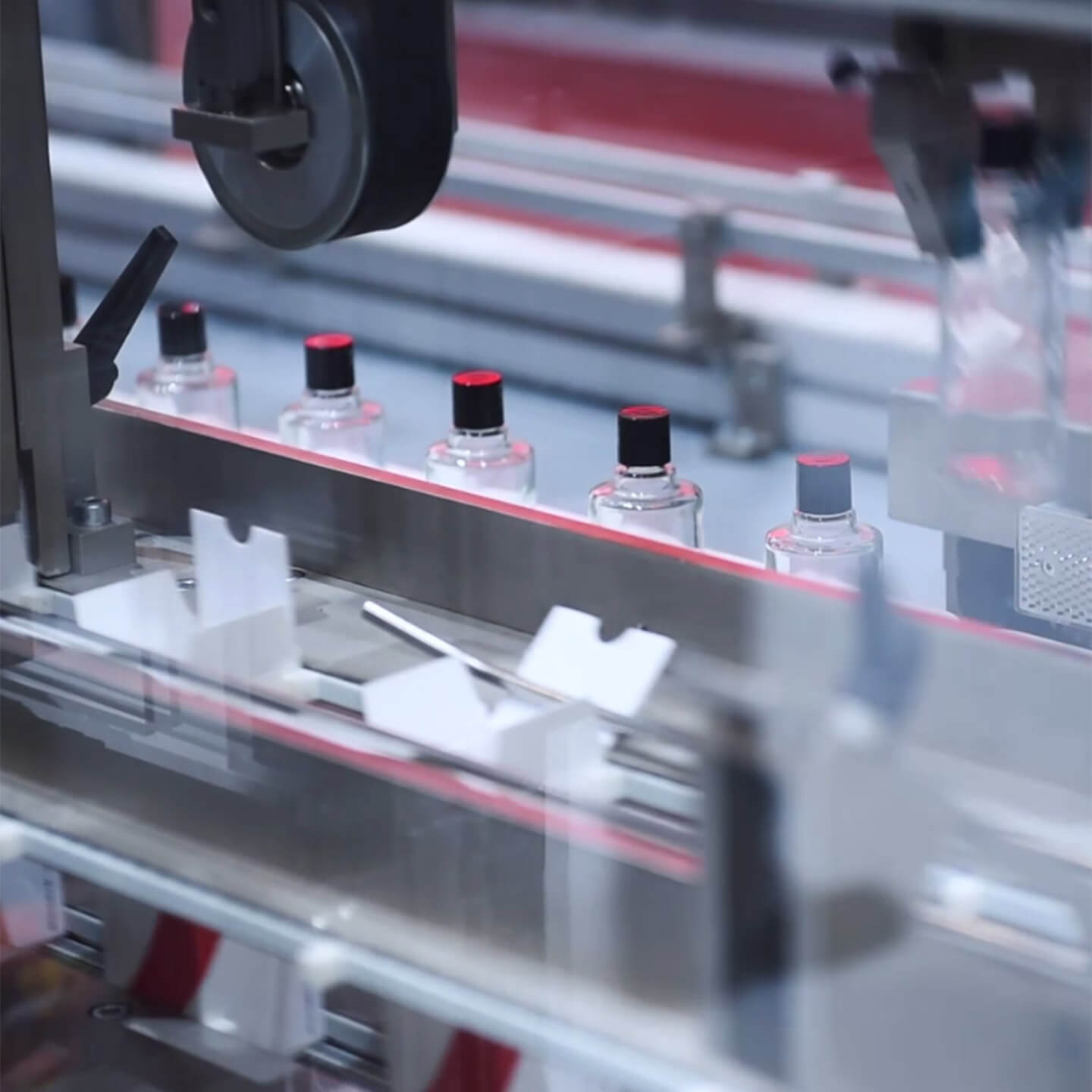
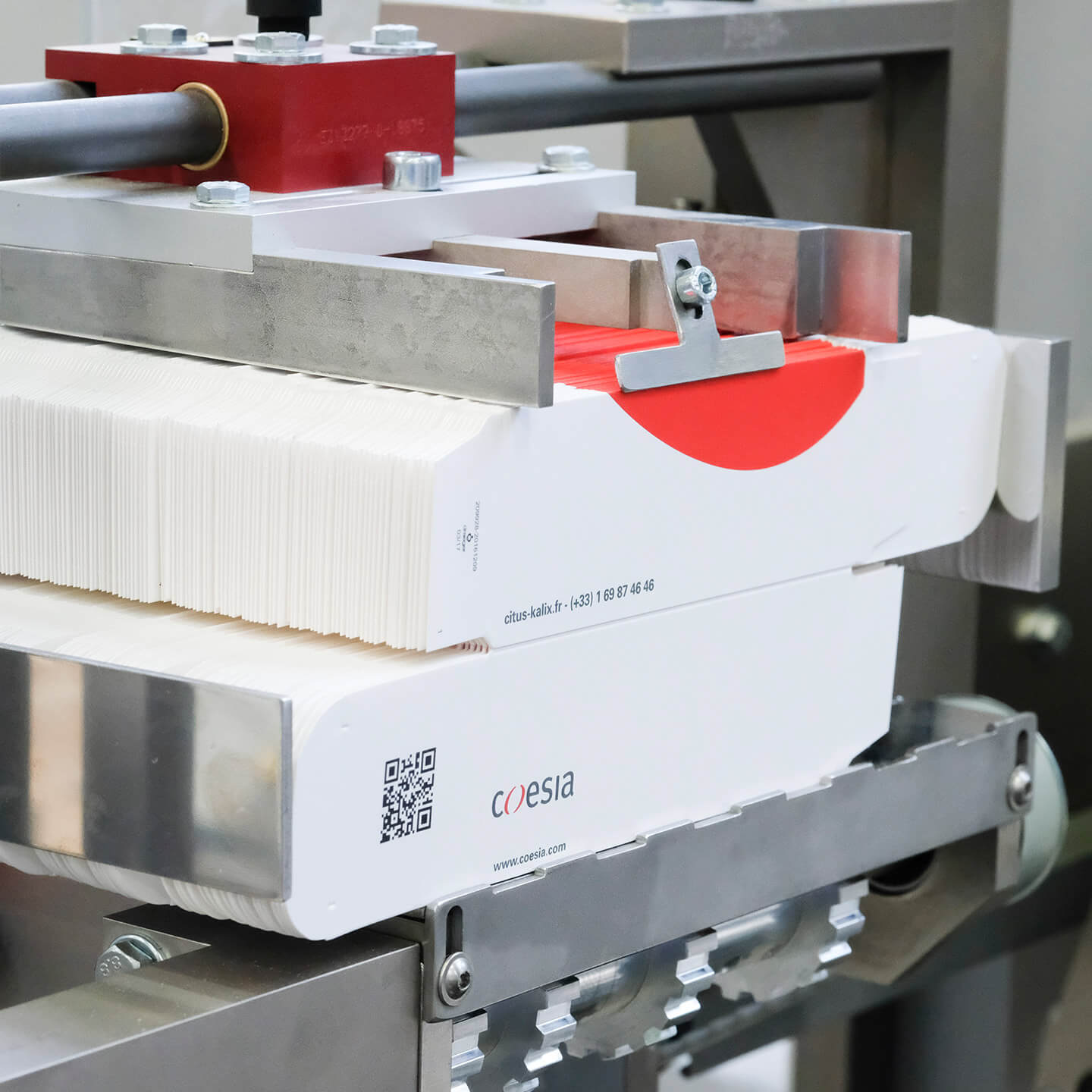
Pionowa kartoniarka Citus Kalix KV800 może być wyposażona w specjalny moduł owijający, który umożliwia kartonowanie butelek i słoików z ich opakowaniem ochronnym. Oferuje dużą elastyczność w nowych zastosowaniach i specjalnych kształtach butelek, a dzięki delikatnej obsłudze może być również stosowany do szczególnie delikatnych produktów. W przypadku osi montażowych i przenośnikowych Citus Kalix opiera się na całościowym rozwiązaniu opracowanym wspólnie z Lenze zarówno na poziomie sterowania, jak i po stronie napędu.
Aby urządzenie maszyny było wydajne, zastosowano FAST Application Software. Te moduły oprogramowania zawierają wstępnie skonfigurowane funkcje ruchu, które oszczędzają czas na etapie projektowania. Obejmuje to również funkcje robotyki dla systemów manipulacyjnych, które znajdują zastosowanie w sektorze opakowań. Dla ruchu pick & place konstruktor maszyny musi na przykład wybrać odpowiedni model kinematyczny, a następnie otworzyć moduł technologiczny w programie i wykonać parametryzację – aplikacja może zostać uruchomiona. Zadanie umożliwia ustrukturyzowane i w dużym stopniu standardowe programowanie. Często powtarzające się funkcje mogą być szczegółowo przedstawione za pomocą wstępnie zdefiniowanych modeli. W ostatecznym rozrachunku wypróbowane, modułowe komponenty oprogramowania są dostępne dla dalszych projektów rozwojowych.
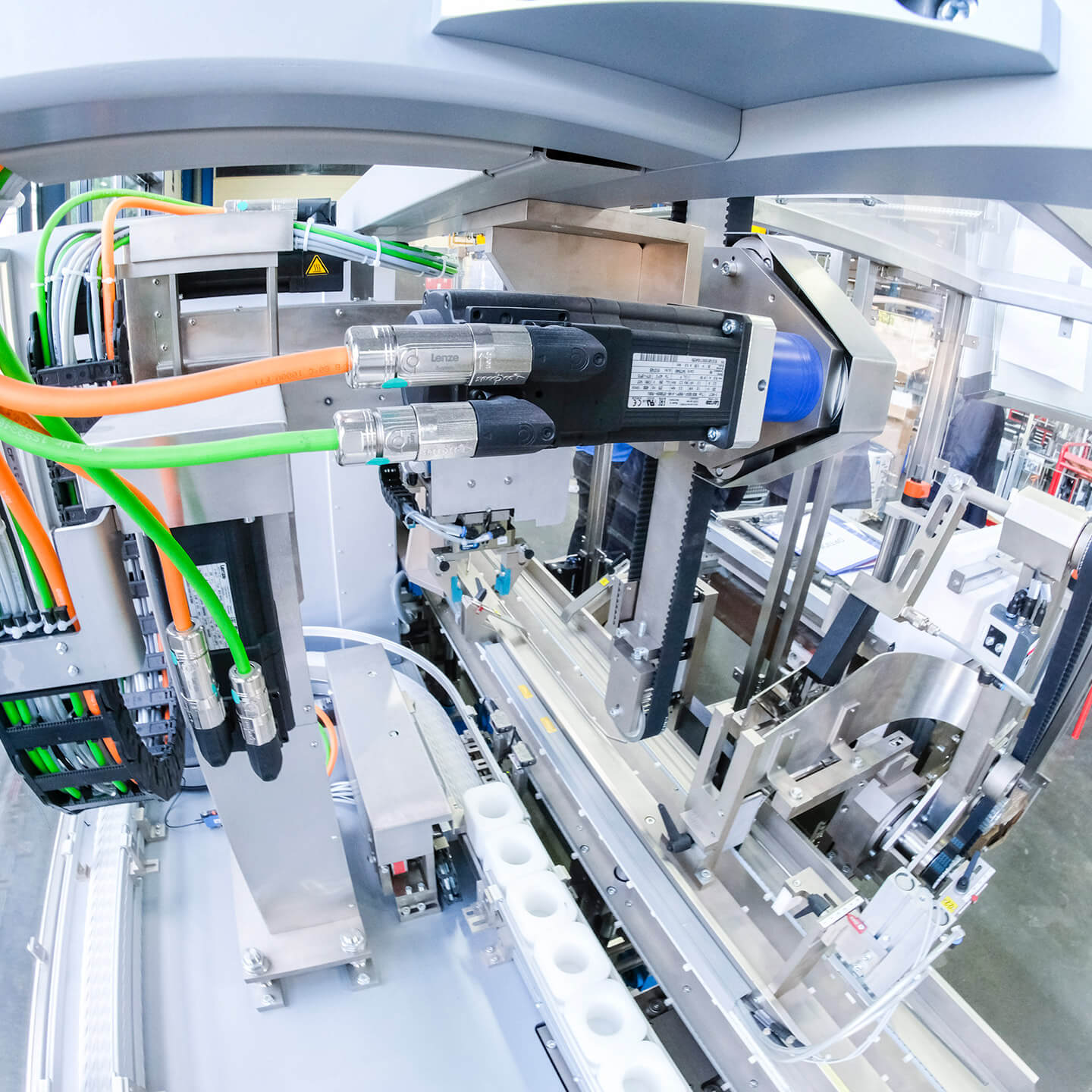


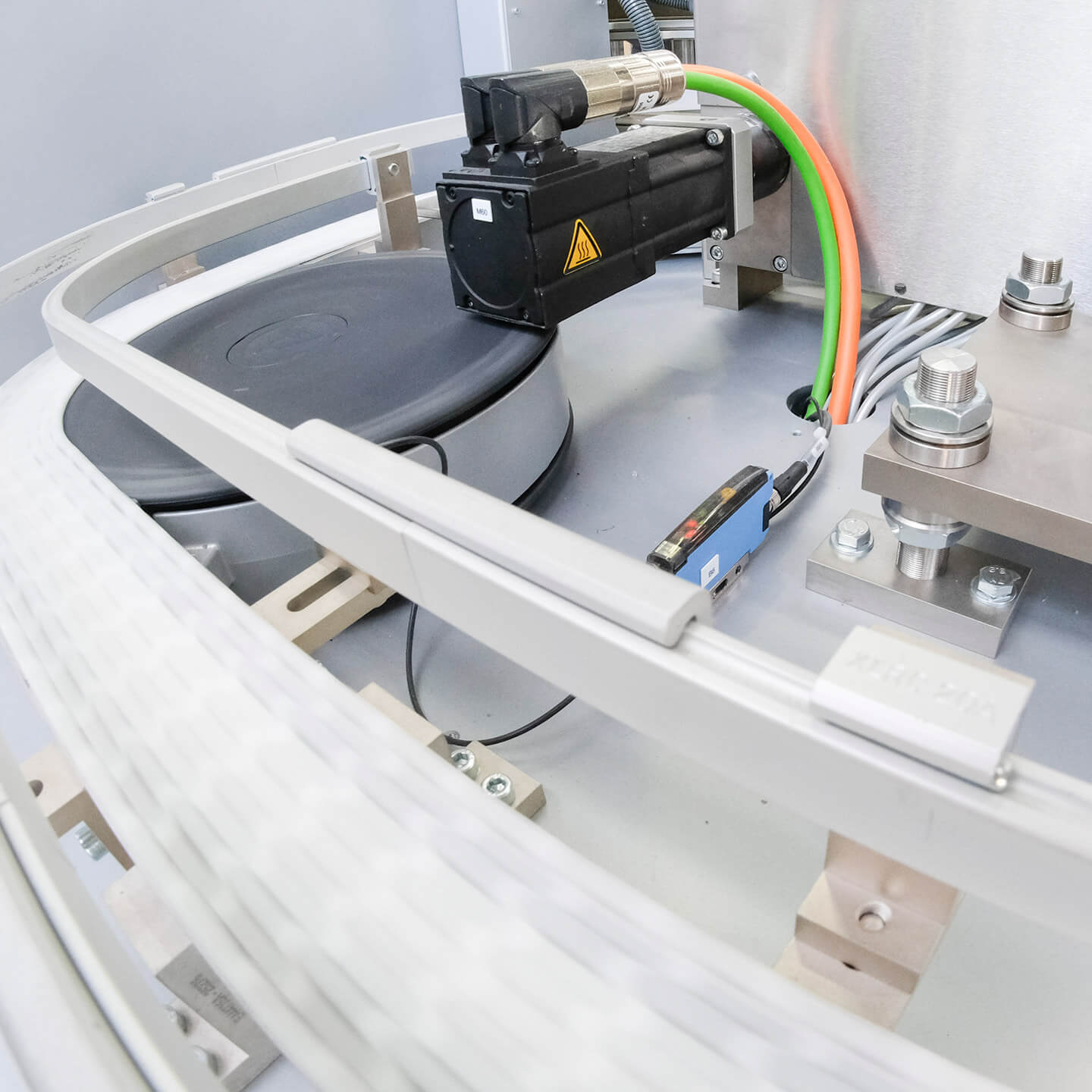
Ze względu na aktualną architekturę automatyki, ze sterownikiem Lenze 3200 C jako “mózgiem” dla Motion Control , Citus Kalix pozostawia klientowi wybór systemu robotów zgodnie z jego potrzebami i przyzwyczajeniami. “Wyraźnie oddzieliliśmy sterowanie ruchem od sterowania sekwencyjnego. Możemy łatwo zmienić markę robotów, ponieważ nasza wiedza i większość pracy związane są z kontrolą ruchu” – wyjaśnia Anthony Defois.